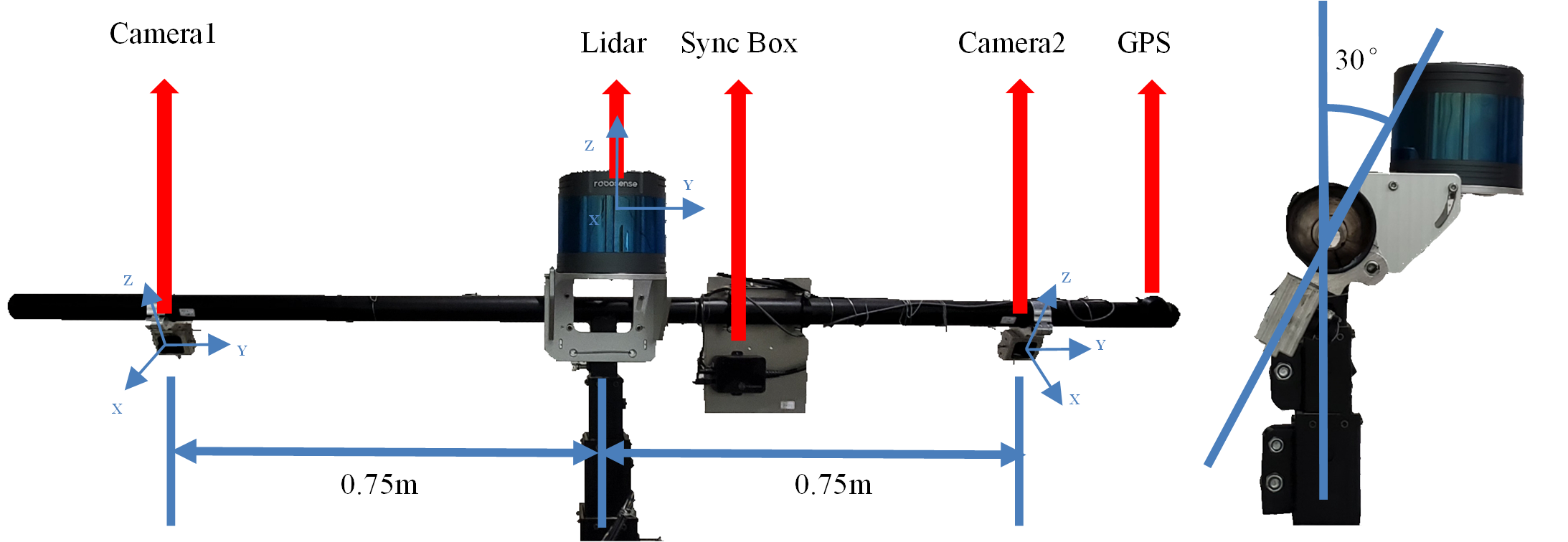

Below are the detail parameters for the sensors.
| sensors | Information |
| Robosensor Ruby-Lite Lidar |
80 beams, 10Hz detect, range: 230m, single echo mode, hFOV: 0°-360°, vFOV: -25°-15°, angle resolution: 0.2° |
| Sensing-SG5 color camera |
30Hz, 5.44MP, CMOS: Sony IMX490RGGB, rolling shutter, HDR dynamic range: 120dB, resolution: 1920×1080 |
| BS-280 GPS |
Time error: less than 1 us |
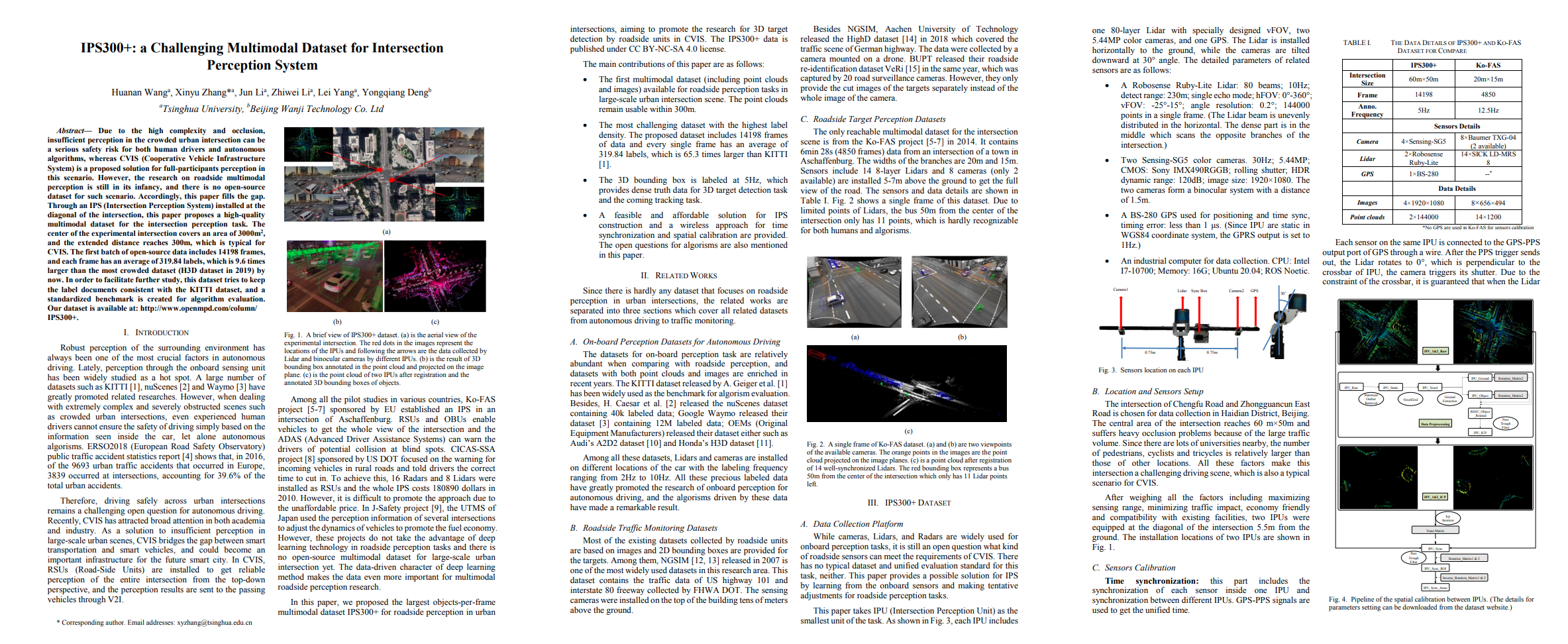
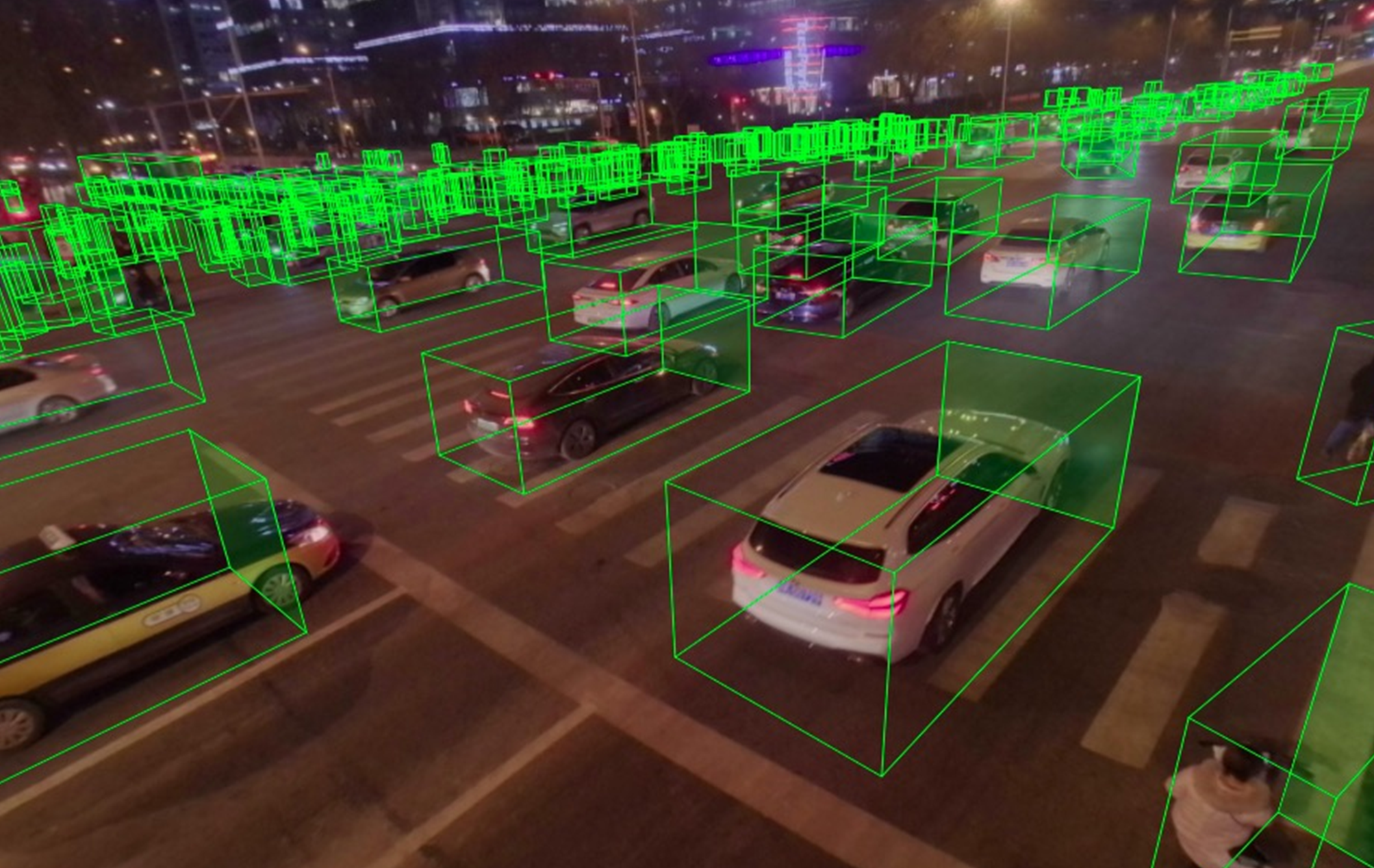
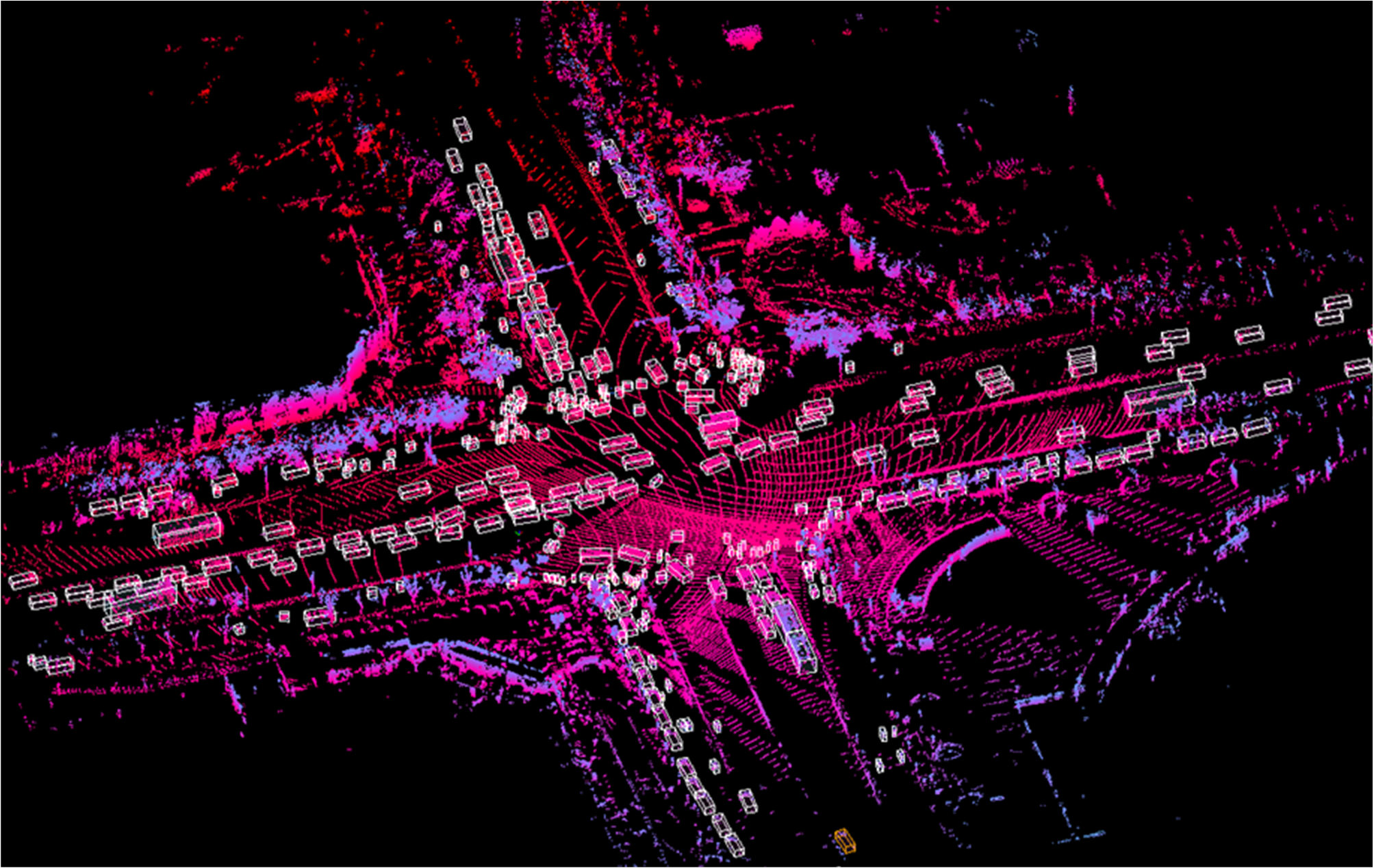
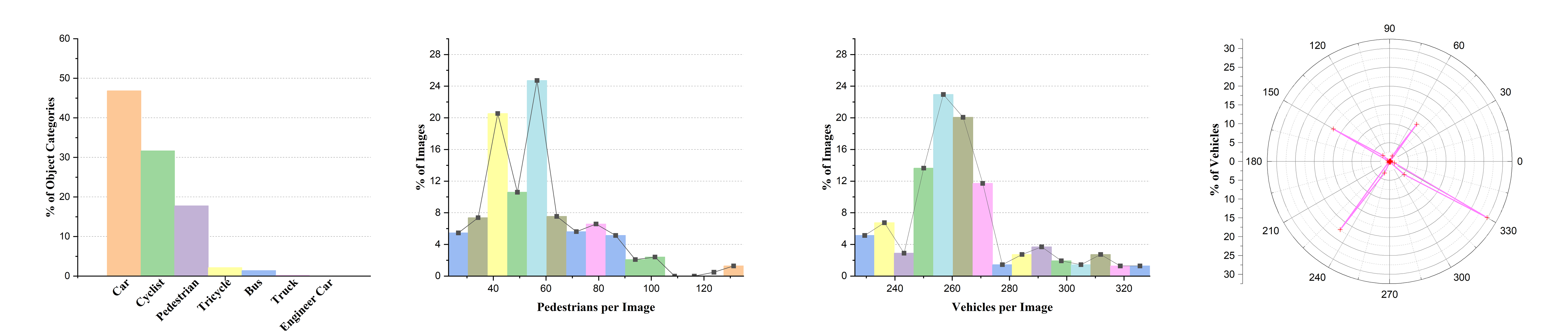
The 3D bounding box annotation contaions 7 kinds of categories on both point cloud and RGB diagram. For most of frame, the number of pedestrains is around 40 to 60 per frame, the number of cars is around 250-270 per frame.
└─IPS300+_detection
├─calib
│ calib_file.txt
│ README.txt
├─data
│ ├─PCD_COM_ROI
# Pointclouds from two IPUs after preprocess our article. (The labeling work is under these pointclouds)
│ ├─IPU1
│ │ ├─IPU1_cam1
# Raw images (have distort) of each camera.
│ │ ├─IPU1_cam2
│ │ ├─IPU1_pcd
# Raw pointclouds (removed None) of each Lidar.
│ │ └─IPU1_cam1_undistort
# Undistort images in jpg format.
│ └─IPU2
│ ├─IPU2_cam1
│ ├─IPU2_cam2
│ ├─IPU2_cam1_undistort
│ └─IPU2_pcd
├─label
│ ├─json
# Label in json format
│ ├─txt
# Label in txt format
│ └─README.txt
└─README.txt
└─IPS300+_raw
│ README.txt
├─car_raw
│ turned_left.7z
│ went_straight.7z
├─RSU1_raw
│ │ 2020-12-16-17-27-48.7z.001
│ │ 2020-12-16-17-27-48.7z.002
│ │ 2020-12-16-17-27-48.7z.003
│ │ 2020-12-16-17-27-48.7z.004
│ │ 2020-12-16-17-34-57.7z.001
│ │ 2020-12-16-17-34-57.7z.002
│ │ 2020-12-16-17-34-57.7z.003
│ │ 2020-12-16-17-41-38.7z
│ │ 2020-12-16-17-44-50.7z.001
│ │ 2020-12-16-17-44-50.7z.002
│ │ 2020-12-16-17-44-50.7z.003
│ │ 2020-12-16-17-44-50.7z.004
│ └─2020-12-16-17-50-21.7z
└─RSU2_raw
│ 2020-12-16-17-27-45.7z
│ 2020-12-16-17-34-55.7z
│ 2020-12-16-17-41-29.7z
│ 2020-12-16-17-44-49.7z
└─2020-12-16-17-50-23.7z
└─IPS300+_tracking
├─01
│ ├─README.txt
│ ├─label
│ │ ├─json
│ │ │ 000000_LABEL.json
# Label in json format.
│ │ ├─txt
│ │ │ 000000_LABEL.txt
# Label in txt format.
│ │ └─README.txt
│ └─data
│ ├─PCD_COM_ROI
│ ├─IPU1
│ │ ├─IPU1_cam1
# Raw images (have distort) of each camera.
│ │ ├─IPU1_cam2
│ │ ├─IPU1_pcd
# Raw pointclouds (removed None) of each Lidar.
│ │ └─IPU1_cam1_undistort
# Undistort images in jpg format.
│ └─IPU2
│ ├─IPU2_cam1
│ ├─IPU2_cam2
│ ├─IPU2_cam1_undistort
│ └─IPU2_pcd
├─...............
└─README.txt
The IPS300+ data is published under CC BY-NC-SA 4.0 license. You may need to send an email to whn19@mails.tsinghua.edu.cn to obtain the password for download.
Thanks to Datatang(Stock Code : 831428) for providing us with professional data annotation services. Datatang is the world’s leading AI data service provider. We have accumulated numerous training datasets and provide on-demand data collection and annotation services. Our Data++ platform could greatly reduce data processing costs by integrating automatic annotation tools. Datatang provides high-quality training data to 1,000+ companies worldwide and helps them improve the performance of AI models.


Tsinghua University
Haidian District, Beijing, 100084, P. R. China
Email:xyzhang@tsinghua.edu.cn